Zephyr 爱好者月刊第 17 期
这里记录 Zephyr 最新的消息和值得分享的内容,每月最后一周发布。
本杂志开源(GitHub:lgl88911/Zephyr_Fans_Monthly),欢迎提交 issue、投稿或推荐 Zephyr 相关内容。
项目数据 链接到标题
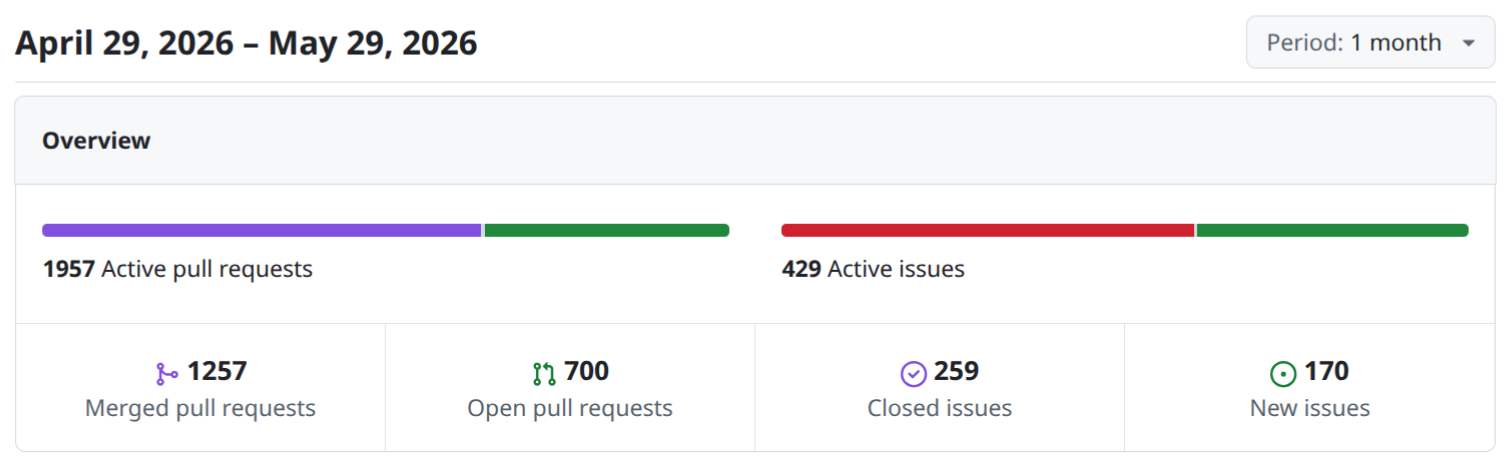
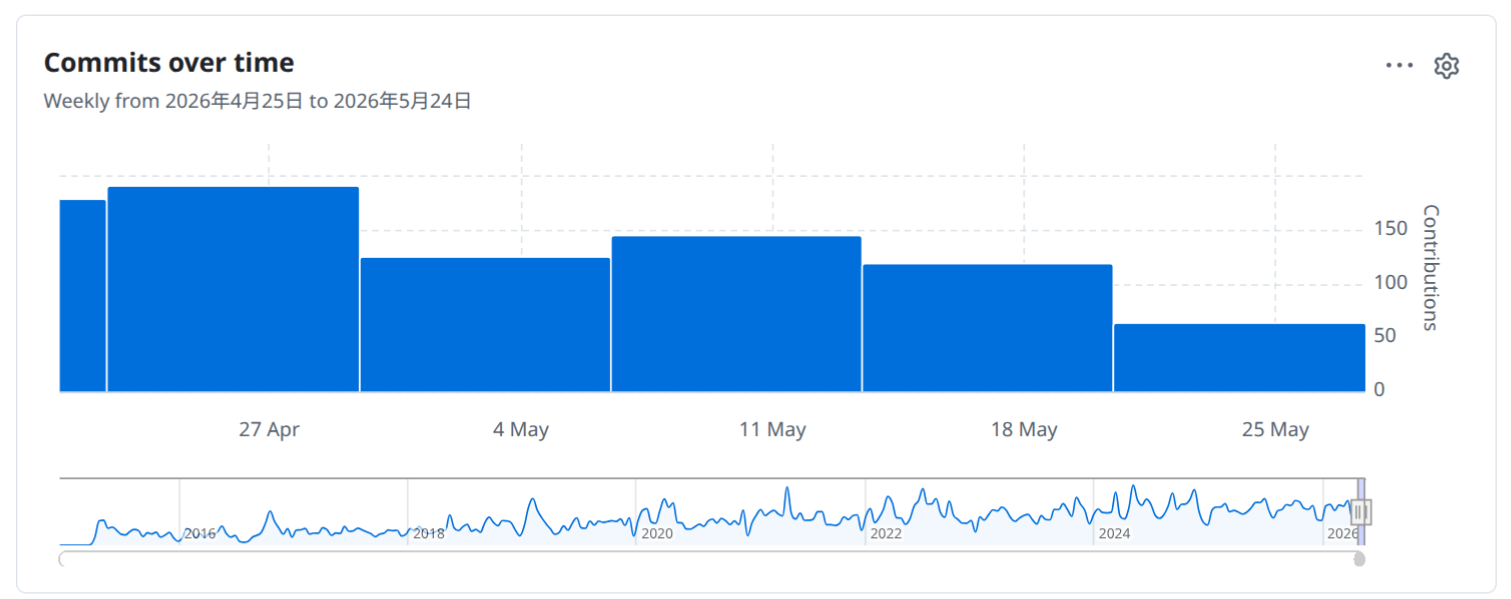
不包括合并,412 位作者向主分支推送了 2349 次提交,向所有分支推送了 2510 次提交。 在主分支上,共有 6973 个文件发生了变化,新增了 183421 行,删除了 37240 行。
近期动向:
- 处理LOG_ERR冲突
- 设备树中interrupt-controllers标准化命名
- 增加tricore架构支持
- 导入Device API继承机制
- 导入Clock Monitor 驱动API
- 添加XC32工具链
- 添加Espressif RMT驱动
- 导入buzzer 驱动
- 减少=>规范使用HAL
- 多实例 CDC ACM
- SRAM地址配置转移到DTS
新闻&活动 链接到标题
Zephyr Project 以专属 track 形式参与 2026 年 6 月孟买开源峰会,主要看点包括:
- TI 工程师对裸机开发者「Zephyr 恐惧」的祛魅
- Linumiz 展示芯片厂商下游维护的实战经验
- Linux Foundation 基于新研究发布的十周年生态洞察
- Silicon Signals 团队提出的嵌入式 AI 视觉系统关键增强需求。
这些议题共同指向 Zephyr 在保持实时操作系统核心特质的同时,如何回应快速迭代的上游节奏与日益复杂的边缘 AI 负载。
- 线下见面会
2026年5月12日,丹麦哥本哈根,主办方“Demant A/S”,赞助方“Demant、STMicroelectronics”,演讲企业:Nordic Semiconductor、Oticon、Linumiz GmbH、NXP Semiconductors
https://www.zephyrproject.org/recap-zephyr-project-meetup-march-26-2026-rennes-france/
2026年3月26日,法国雷恩市,主办方:Savoir-faire Linux、Silicon Labs
3、Arduino Core on Zephyr 项目迎来 0.55.0 里程碑版本
Arduino Core on Zephyr 项目迎来 0.55.0 里程碑版本,预计这是最后一个 Beta 版本,2025 年 6 月将正式发布稳定版本。
此次迁移源于 Arm 2024 年终止 Mbed 平台,Arduino 选择全开源 Zephyr RTOS 作为替代,历时两年开发。新版本核心改进包括:串口打印即开即用并统一多 IDE 体验、新增 RTC 日历与 NTP 同步、UNO Q 支持 CAN 总线与动态中断、任意引脚移位操作、Zephyr 工作队列支持及多项修复。硬件支持扩展至 Nicla Vision 等 9 款板卡。同时 Arduino 将弃用 mbedOS 核心,该项目标志着 Arduino 从依赖厂商闭源生态转向开源基础设施的关键战略转型。
4、Automotive Grade Linux 发布开源 SoDeV 平台
Automotive Grade Linux 于 2026 年 5 月 14 日发布开源 SoDeV 参考平台初始版本「Ultimate Unagi」,是面向软件定义汽车(SDV)的预集成开源解决方案。该平台整合 AGL 统一代码库、Linux 容器、Xen 虚拟化、Zephyr 实时操作系统等技术,支持在 Renesas 硬件、虚拟机及云端运行,实现软硬件解耦开发,显著缩短 SDV 上市周期。
同期,EMQ、Lineo Solutions、MediaTek、VA Linux Systems Japan 和 Very Good Ventures 五家企业加入 AGL 社区,分别覆盖数据骨干基础设施、嵌入式 Linux、汽车芯片、内核工程及 Flutter 界面等关键领域,体现 SDV 生态对跨行业专业能力的需求。
Ultimate Unagi 版本采用 Yocto Scarthgap LTS 长期支持,升级 Flutter 工具链与车辆信号规范,并提供两年维护周期。AGL 同时开放 2026 年柏林全体成员会议的提案征集,持续推动开源汽车软件的标准化与产业化进程。
文摘&观点 链接到标题
1、企业如何选择和部署 RTOS——基于 Zephyr 十年研究报告
这篇文章基于 Linux Foundation《Zephyr® Turns 10》研究报告,系统分析了企业 RTOS 选择与部署策略。
研究发现:RTOS 决策呈现三种模式——单一标准化(30%)、小型组合优选(29%)和逐项目评估(20%),其中 Zephyr 用户更倾向结构化长期规划。
核心决策因素从「技术性能」转向「生态系统成熟度」,涵盖工具链、社区活跃度、硬件支持及现代工作流适配性。
| 传统视角 | 现代转变 |
|---|---|
| 选择独立操作系统 | 选择可持续生态系统 |
| 关注即时技术匹配 | 关注多年部署维护支持能力 |
| 单一产品周期考量 | 软件定义、持续连接的长周期视角 |
部署规模方面,Zephyr 在中大规模传感监测场景中优势显著,而非用户多用于交通机器人领域。
-
Zephyr 优势领域:
- 中大规模部署(数十万至数百万设备集群)
- 需要跨异构硬件平台的可移植性
- 传感、监测、数据采集应用
- 资源受限且需硬件灵活性的场景
-
非 Zephyr 用户集中领域:
- 交通运输
- 机器人相关部署
-
RTOS 应用拓展边界(超越传统嵌入式/IoT):
- 消费电子
- 公共照明系统
- VR/AR 设备
- USB 控制器
- 工业基础设施
资源约束(128-512KB RAM为主)和有限预算使开源生态与成本效率成为关键考量。
当今的趋势:RTOS 选择从「选内核」演变为「选可持续生态」,需支撑产品 5-10 年以上的全生命周期。Zephyr 凭借十年成熟度正成为生产环境可信选择,但仍面临上手、安全认证与长期维护等挑战。
Reddit 上对参与开源社区的讨论,Zephyr 和 Home Assistant 成为对比讨论的核心:Zephyr 作为一个工业级嵌入式开发平台,与典型的个人爱好者驱动项目(如 Home Assistant)在文化、运作方式和准入门槛上的显著差异。
- Zephyr 的「门槛」并非恶意,而是其工业级特性的必然结果。 作为一个致力于成为工业标准的开源项目,必须优先考虑代码库的健壮性和长期的可扩展性,而非仅仅迎合个体的兴趣或便捷性。相比之下,Home Assistant 更偏向终端用户,因此其文化更倾向于开放和包容,这导致了用户在跨社区贡献时会产生「截然不同」的感受。
- 开源社区体验差异源于项目基因、目标场景与规模压力三个方面。Home Assistant 作为原生开源的消费者项目,以爱好者生态为核心,友好协作是其增长策略;Zephyr 由专有项目转型而来,服务于工业嵌入式场景,稳定与可维护性优先于个体贡献体验,严格的 RFC 流程和稀缺审查资源构成高准入门槛。
讨论上有个有趣的观点:说这是「集市」式自由协作与「大教堂」式工程纪律的张力——后者在涉及硬件成本与安全认证的嵌入式领域尤为凸显。贡献者需识别项目类型,调整预期:爱好者项目重社区融入,工业项目重流程适配与长期信誉积累。集市和大教堂原本是用来类比开源和闭源两种模式,该文章则引申到开源的自由协作和工程纪律管理。
这是一篇对 Zephyr 技能的评价文章:层级属于 TIER 2(中级技能),领域为 Tech(技术类),薪资影响力为 High(高)

该技术栈要求扎实的 C 语言基础,学习周期约 5 个月,难度较高,但薪资回报显著——美国资深工程师可达 $170K。关键学习门槛包括 Kconfig 构建系统、Device Tree 硬件描述语法、West 元工具链,以及通过 QEMU/GDB 进行仿真调试的能力。典型职业路径为嵌入式系统工程师与物联网固件工程师,工作涉及跨平台移植、实时任务调度优化及底层驱动开发。对于需在资源受限设备上实现联网功能的开发者,Zephyr 是当前工业界增长最快的 RTOS 选择之一。

Zephyr RTOS 是 Linux Foundation 托管的开源实时操作系统,以模块化内核、统一工具链(West/Kconfig/Devicetree)和跨架构支持(ARM/RISC-V/x86)为核心竞争力。其安全原生设计(MPU、安全启动、OTA 更新)与 800+ 开发板生态,使其成为无线 IoT、边缘 AI 及安全关键型嵌入式应用的优选平台。相比 FreeRTOS 和裸机方案,Zephyr 通过硬件抽象层实现厂商无关性,降低供应链锁定风险;CMake 标准化构建则支撑 DevOps 流程,加速产品迭代。然而,Linux 风格的复杂度意味着显著的学习投入——Kconfig 配置、devicetree 语法及驱动模型均需比较专业的积累。因此,Zephyr 最适合长期项目、具备相关背景的团队,以及需要集成无线协议栈或高级安全的场景;对于简单快速的原型开发,传统方案仍更为合适。战略上,Zephyr 既是技术杠杆,也是规避嵌入式市场高风险的长期保险。
关键技术规格
| 维度 | 特性 |
|---|---|
| 内核架构 | 单地址空间单片内核,支持多种调度算法,MPU 内存保护 |
| 硬件支持 | ARM Cortex-M/R/A、RISC-V、x86(x86 主要用于主机仿真开发) |
| 开发板生态 | 800+ 开发板,NXP、Nordic、Intel 等主流厂商深度参与 |
| 能效设计 | 编译时模块化配置(Kconfig),最小化内存占用与处理开销 |
开发最佳实践与常见陷阱规避
| 常见陷阱 | Zephyr 解决方案 | 战略收益 |
|---|---|---|
| 时间关键代码中的阻塞调用 | RTOS 原语(信号量、消息队列)实现事件驱动非阻塞架构 | 提升可靠性,减少调试时间 |
| 缺乏自动化测试 | 原生测试框架 + CI/CD 集成 | 早期缺陷发现,加速开发 |
| 复杂中断处理 | ISR 极简设计 + 线程延迟处理 | 系统行为更确定、更稳健 |
| 依赖硬件测试 | 主机仿真环境运行代码(devicetree 抽象) | 降本增效,支持并行开发 |
| 错误处理缺失 | 结构化错误处理 + 日志与恢复机制 | 防止灾难性故障 |
性能优化专业技巧
- 功耗管理:深度睡眠模式、外设/时钟门控、ISR 最小化、数据采样频率优化
- 调试进阶:JTAG/SWD 硬件调试器 + GDB 集成、边界测试、分治调试法
- 量产扩展:Kconfig + devicetree 的灵活性支撑 DfM(可制造性设计)与 DfT(可测试性设计)
战略商业价值(决策层视角)
| 技术特性 | 商业转化 |
|---|---|
| 高度模块化可配置 | ↓ 开发成本,↑ 上市速度 |
| 开源免版税 | ↓ 总拥有成本,预算释放至硬件等关键领域 |
| 安全原生架构 | ↑ 产品可靠性,↓ 召回/泄露风险,强化品牌信任 |
| 跨架构支持(ARM/RISC-V) | 长期业务敏捷性,规避供应链/厂商锁定风险 |
| DevOps 就绪工具链 | 持续集成自动化,快速响应市场需求 |
Reddit 上围绕 Linux 工程师转型 Zephyr/RTOS 职位的可行性讨论的帖子。
社区总体持谨慎支持态度:多数认为 Linux 背景是良好基础,因两者共享底层概念,且 Zephyr 在某些方面甚至比 Linux 更「高层」、更易用。核心障碍在于设备树的编译时处理机制、小型 OS 生态的驱动/资源局限,以及企业招聘的保守倾向。建议转型者通过业余项目积累实战经验,并瞄准已有传统 MCU 专家的团队作为互补角色。
个别反对声音指出 Zephyr 更新稳定性问题及硬件调试经验的不可替代性。讨论折射出嵌入式领域技术栈融合的趋势,从侧面反映大家对「精确匹配」的偏好。
本文通过 Silicon Labs 高管 Chad Steider 的访谈,系统阐述 Zephyr 在物联网领域的战略价值。
随着物联网设备从简单连接向智能化、高安全、长周期部署演进,专有软件栈的低效性日益明显。Zephyr 作为行业共享平台,通过全球社区协作提供经过验证的核心系统能力,使企业能聚焦应用层创新。其强调,在规模化部署中,统一平台对安全更新、互操作性和生命周期管理至关重要;同时安全与能效必须协同设计而非权衡取舍。
展望未来五年,开源模式将重塑物联网开发范式——加速产品上市、简化人才获取、增强跨生态兼容性,最终成为驱动行业创新的核心力量。
技术 链接到标题
本文以 Zephyr 经典 blinky 示例为对象,展示如何实现从 1.8MB 静态库总和精简到 20KB 最终二进制。核心机制包含三层:
- 编译器默认启用
-Os体积优化; - 构建系统通过 Kconfig 仅编译被配置的组件(如 I2C/SPI 驱动因未使用而排除);
- 链接器采用 Unix SysV 经典的选择性包含技术,以目标文件为粒度丢弃未引用代码——如
mutex.c.obj因无调用而被自动剔除。
作者强调良好的编译单元划分是链接优化的工程前提,并介绍了 rom_report/ram_report 分析工具及 v4.4 新增的 HTML 仪表板。
┌─────────────────────────────────────────┐
│ 1. 编译器层: -Os 默认优化代码体积 │
├─────────────────────────────────────────┤
│ 2. 构建系统层: 仅构建被配置/依赖的组件 │
├─────────────────────────────────────────┤
│ 3. 链接器层: 丢弃未引用的目标文件 │
└─────────────────────────────────────────┘
↓
20 KB blinky.bin
2、Zephyr 中 Kconfig 与 Devicetree 协同机制解析
Zephyr 采用 Kconfig 与 Devicetree 双系统分离设计,分别解决「编译什么软件」与「描述什么硬件」的问题。
Kconfig 继承自 Linux 内核,通过层级化的符号系统与 prj.conf 控制特性使能;Devicetree 以节点-属性结构描述硬件拓扑,用户通过 .overlay 扩展而非修改官方板级文件。两者在 CMake 阶段独立并行处理,输出 .config 宏与 devicetree.h 头文件,共同供给编译器。
驱动生效必须同时满足:Kconfig 编译驱动源码、Devicetree 提供可用硬件节点。掌握 menuconfig 探索依赖、正确命名 overlay 文件、理解错误诊断信息,是高效使用 Zephyr 构建系统的关键。
本文系统阐述基于 Zephyr 构建量产级 IoT 设备的工程方法论,指明结构性组织优于功能堆砌。作者以 nRF52840-DK 为参考平台,强调 Zephyr 本身已具备完整的 BLE、电源管理、驱动生态,团队失败的主因在于未掌握其构建系统(west/Kconfig/Devicetree/CMake)。
文章力推 T2 应用中心式工作空间,通过 west.yml 锁定依赖版本,实现可复现构建与自主更新节奏。目录结构采用子系统级模块化(src/ble/、src/sensors/等),配合分层 Kconfig 策略(基础 prj.conf + 板级 .conf + 构建类型 overlay)与 Devicetree 板级隔离,使多板型扩展与自定义 PCB 迁移时应用代码零改动。
调试层面,文章构建场景化工具矩阵,突出线程感知 GDB(CONFIG_DEBUG_THREAD_INFO)、延迟日志模式、RTT Shell 及 Coredump 现场诊断的价值,并警示 nRF52 平台的 Flash 冲突、west flash –erase 破坏性、过早电源优化三大陷阱。
现场部署章节将良好结构直接转化为 MCUboot OTA 集成、看门狗 + retained RAM 故障恢复等量产能力,最终形成 12 项检查清单。
全文的核心:前两周对构建系统的深度投资,决定项目三个月后的存亡。
4、Ada on Zephyr:Alire Skill 打通两大生态系统
本文详解 AdaCore 发布的 Alire Skill 借用 LLM + agent 的能量将 Ada/SPARK 形式化验证语言与 Zephyr 实时操作系统无缝集成。通过三层架构(Ada 应用层、C shim 适配层、Zephyr RTOS 层)解决两大生态系统的构建工具鸿沟。
Ada 的 gprbuild 与 Zephyr 的 CMake/west 原本互不相识。Alire 负责工具链的自动解析与隔离缓存,CMake 通过读取 GPR 文件实现配置单一来源,最终生成静态库链接至 Zephyr 镜像。
文章重点剖析了 Zephyr 相关的两个链接陷阱(abort() 重复定义与浮点 ABI 匹配)、C 宏封装必要性、以及板级可移植性设计。SPARK 证明独立于交叉编译在主机运行,通过规约-实现分离模式确保业务逻辑的形式化验证。整个流程简化为 make 一键构建,使安全关键固件开发既能利用 Zephyr 丰富的板级支持生态,又保留 Ada/SPARK 的静态保证能力。
Tasuku Suzuki 成功将标准 Qt 6.11.0 完整移植到Zephyr RTOS,在NXP Cortex-M7 MCU(无 MMU,64MB RAM)上零修改运行官方 Qt Quick、Qt Widgets、QPainter 等示例。
核心创新是qzephyr QPA 插件,将 Qt 的 OS 抽象层对接 Zephyr 的显示/输入子系统;关键技术突破包括:
- 两阶段构建分离、V4 JS 引擎适配无 MMU 环境(替换
mmap) - 64 位原子操作软实现(PRIMASK 中断屏蔽)
- PXP DMA 硬件旋转
- GT911 触摸异步事件传递
与 Qt for MCUs 不同,此方案保留QtCore/QtGui/QtWidgets/QtQml/QtQuick 完整 API,使现有 Qt 资源可直接复用于 MCU,并借助 Zephyr 的跨厂商抽象实现 Cortex-M/RISC-V/ARC 等多架构统一部署,为嵌入式 Linux 与实时 Zephyr 核的异构双核配置开辟新可能。
本文系统阐述了 Zephyr 在低功耗物联网设备中的电源管理技术体系,并提出:软件层面的智能化功耗管理是实现电池供电设备数年续航的关键,其重要性不亚于硬件效率本身。
文章从五个维度解析 Zephyr 的技术优势:
- 系统级电源管理通过 Idle/Light Sleep/Deep Sleep 三级状态实现 CPU 动态降耗
- 设备运行时电源管理针对射频、传感器等高功耗外设进行精细化开关控制
- Tickless Kernel 消除传统 RTOS 的周期性时钟中断,使 CPU 获得连续深睡眠机会
- 多元唤醒源机制确保系统在可靠响应事件的同时避免无效唤醒
代码片段 链接到标题
以下是一个与设备树相关的代码片段,展示了 Zephyr 中设备初始化的机制:
__init__device_dts_ord_12: i2c_esp32_init(__device_dts_ord_12)
这个代码片段展示了 ESP32 I2C 驱动的初始化过程,其中 __init__device_dts_ord_12 是一个初始化函数,用于根据设备树顺序编号 12 初始化 ESP32 的 I2C 设备。
- BLE专项优化通过连接参数调优将无线通信功耗压缩至最低。
┌─────────────────────────────────────┐
│ Zephyr电源管理架构 │
├─────────────────────────────────────┤
│ ① System Power Management │
│ → CPU/系统级功耗控制 │
├─────────────────────────────────────┤
│ ② Device Runtime Power Management │
│ → 外设动态挂起/恢复 │
├─────────────────────────────────────┤
│ ③ Tickless Kernel │
│ → 消除周期性时钟中断 │
├─────────────────────────────────────┤
│ ④ CPU Sleep State Handling │
│ → 多级睡眠状态管理 │
├─────────────────────────────────────┤
│ ⑤ Peripheral Suspend/Resume │
│ → 外设电源门控 │
└─────────────────────────────────────┘
作者强调,Zephyr的"分层分级、按需供电"架构使开发者能够在不牺牲性能与连接性的前提下,将每个组件压入最低功耗状态。面向能量收集、AI边缘计算等前沿趋势,Zephyr的持续演进正推动物联网设备向"永久续航"愿景迈进。选择Zephyr作为电源管理框架,是构建下一代高效、长寿命物联网设备的战略性技术决策。
课程&教程 链接到标题
1、IAR Arm工具链开发调试Zephyr RTOS的完整流程
本文介绍使用IAR Arm工具链开发调试Zephyr RTOS的完整流程。包括:环境准备需IAR EWARM 9.70.1+及Zephyr SDK;工具链切换通过设置ZEPHYR_TOOLCHAIN_VARIANT=iar和IAR_TOOLCHAIN_PATH两个环境变量实现。调试支持两种模式——外部构建后导入ELF的轻量方式,或完整导入工程的全集成方式,均需勾选Zephyr感知调试插件并启用CONFIG_DEBUG_THREAD_INFO。此外,IAR集成的C-STAT静态分析工具已正式支持Zephyr,可显著提升代码质量与安全性。
全文以NXP FRDM-MCXA153为实例,提供了从构建到调试的实操指引,并附官方文档与GitHub示例资源,便于开发者快速上手。
官方不推荐用WSL,但文章就是要用WSL,典型的犟种教材。我自己也不例外,刚开始至少用了有2年WSL来开发Zephyr,还写来不少相关的文章。
文章详尽拆解了WSL环境搭建、usbipd USB透传配置、多板并行编译的-d目录隔离策略,以及四款模块差异化的刷写机制:nRF52840的UF2拖拽协议、nRF54L15的板载CMSIS-DAP免调试器方案、ESP32系列所需的west blobs fetch二进制Blob获取与双核独立编译。作者特别针对官方文档对WSL的警告进行了实证反驳,提供了权限修复、auto-attach常驻等生产级技巧,最终构建出一套零脚本、零外部工具的统一刷写工作流。
3、Zephyr新书:Zephyr RTOS Cookbook
《Zephyr RTOS Cookbook》由Dr. Roy Jamil与Dr. Ayoub Bourjilat合著的实践指南,预计2026年6月出版。本书突破传统RTOS教材的局限,以"食谱式"案例引导开发者掌握Zephyr的平台化开发范式。
强调可移植性与规模化:通过West构建多仓库工作流、Kconfig实现功能配置、DeviceTree完成硬件抽象,三者协同使应用脱离特定板级绑定。内容涵盖驱动模型、常用子系统(GPIO/I2C/ADC/日志/Shell)、安全用户模式及初始化管理等关键实践。
面向工业与IoT场景,帮助具有嵌入式C基础的开发者从裸机、传统RTOS或Linux平滑迁移至Zephyr生态,最终建立跨硬件、跨团队的可复用代码体系。

工具 链接到标题
该MCP为agent提供工作空间完整分析、Zephyr 版本提取、模块枚举、清单解析、开发板发现和构建系统信息获取等能力。
Zephyr 每月小知识 链接到标题
当我们想了解Zephyr设备初始化的顺序时可以通过west build -t initlevels命令来查看。
EARLY
PRE_KERNEL_1
__init___device_dts_ord_9: clock_control_esp32_init(__device_dts_ord_9)
__init_statics_init_pre: statics_init(NULL)
__init___device_dts_ord_7: gpio_esp32_init(__device_dts_ord_7)
__init___device_dts_ord_13: gpio_esp32_init(__device_dts_ord_13)
__init___device_dts_ord_65: uart_esp32_init(__device_dts_ord_65)
__init___device_dts_ord_68: serial_esp32_usb_init(__device_dts_ord_68)
__init_uart_console_init: uart_console_init(NULL)
PRE_KERNEL_2
__init_sys_clock_driver_init: sys_clock_driver_init(NULL)
POST_KERNEL
__init_enable_logger: enable_logger(NULL)
__init_malloc_prepare: malloc_prepare(NULL)
__init_k_sys_work_q_init: k_sys_work_q_init(NULL)
__init___device_dts_ord_12: i2c_esp32_init(__device_dts_ord_12)
__init___device_dts_ord_27: spi_esp32_init(__device_dts_ord_27)
__init___device_dts_ord_8: regulator_fixed_init(__device_dts_ord_8)
__init___device_dts_ord_28: mipi_dbi_spi_init(__device_dts_ord_28)
__init___device_dts_ord_29: st7789v_init(__device_dts_ord_29)
__init___device_dts_ord_14: cst816s_init(__device_dts_ord_14)
__init___device_dts_ord_15: NULL(__device_dts_ord_15)
__init_enable_shell_uart: enable_shell_uart(NULL)
APPLICATION
__init_lvgl_init: lvgl_init(NULL)